This page contains links to introductory notes and exercises on motion control. The focus is on hydraulic systems, but the control system concepts apply equally well to other technologies (e.g. electro-mechanical, pneumatic)
Reference: Dorf & Bishop, Modern Control Systems, 12th edition, Prentice-Hall, Inc., 2011
Trademarks: MATLAB and Simulink are registered trademarks of The MathWorks, Inc. The MathWorks does not warrant the accuracy of the examples given in these notes.
Introduction
Introduction to Hydraulic Actuation Systems
Electro-mechanical Actuation
Frequency Domain Analysis with Bode Diagrams
Compensator Design
- Introduction to Compensator Design
- Characteristics of Phase-Lead and Phase-Lag Compensators
- Phase Lead Compensator Design
- Frequency Response Design of a Phase Lead Compensator
- Root Locus Design of a Phase Lead Compensator
- Phase Lag Compensator Design
- Frequency Response Design of a Phase Lag Compensator
- Root Locus Design of a Phase Lag Compensator
- PID Compensator Summary
- Using Pre-filters to Obtain ITAE Optimal Response
Control Effort and Saturation
Integrator Wind-up, Saturation, and Noise Filters
Data Acquisition, System Identification and Simulation
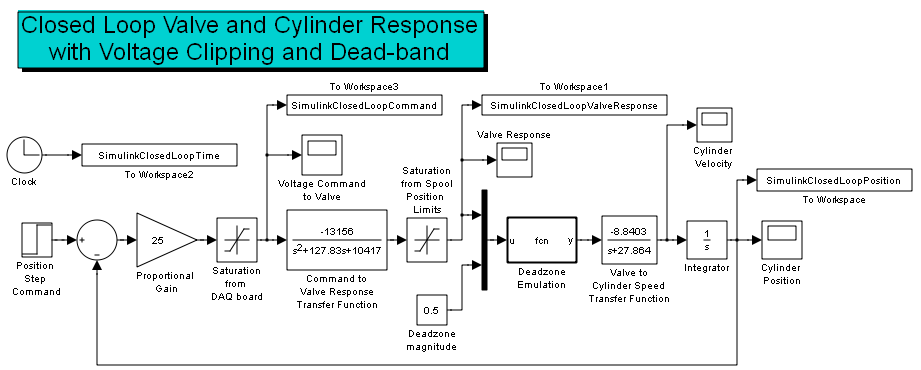
Proportional Closed-Loop Hydraulic Actuator Control
Digital Control of Continuous Systems
- Introduction to Digital Control of Continuous Systems
- Sampled Data
- Z Transforms and the Zero-Order-Hold
- Continuous and Equivalent Discrete Transfer Functions
- Rationale of the Tustin Approximation
- Example: Digital Phase-Lead Control of a Spring-Mass-Damper
- Weighted Sled System
- Example: Digital Phase-Lead Control of a Weighted Sled System
- Closed-Loop, Phase-Lead Control Software
- Discrete Root Locus Analysis of a Weighted Sled System
Differential Equations and Difference Equations
Difference Equations and Approximate Solutions to Differential Equations
